Engineering Projects & Teaching
ME 292C Design with Morphing Materials & Mechanisms
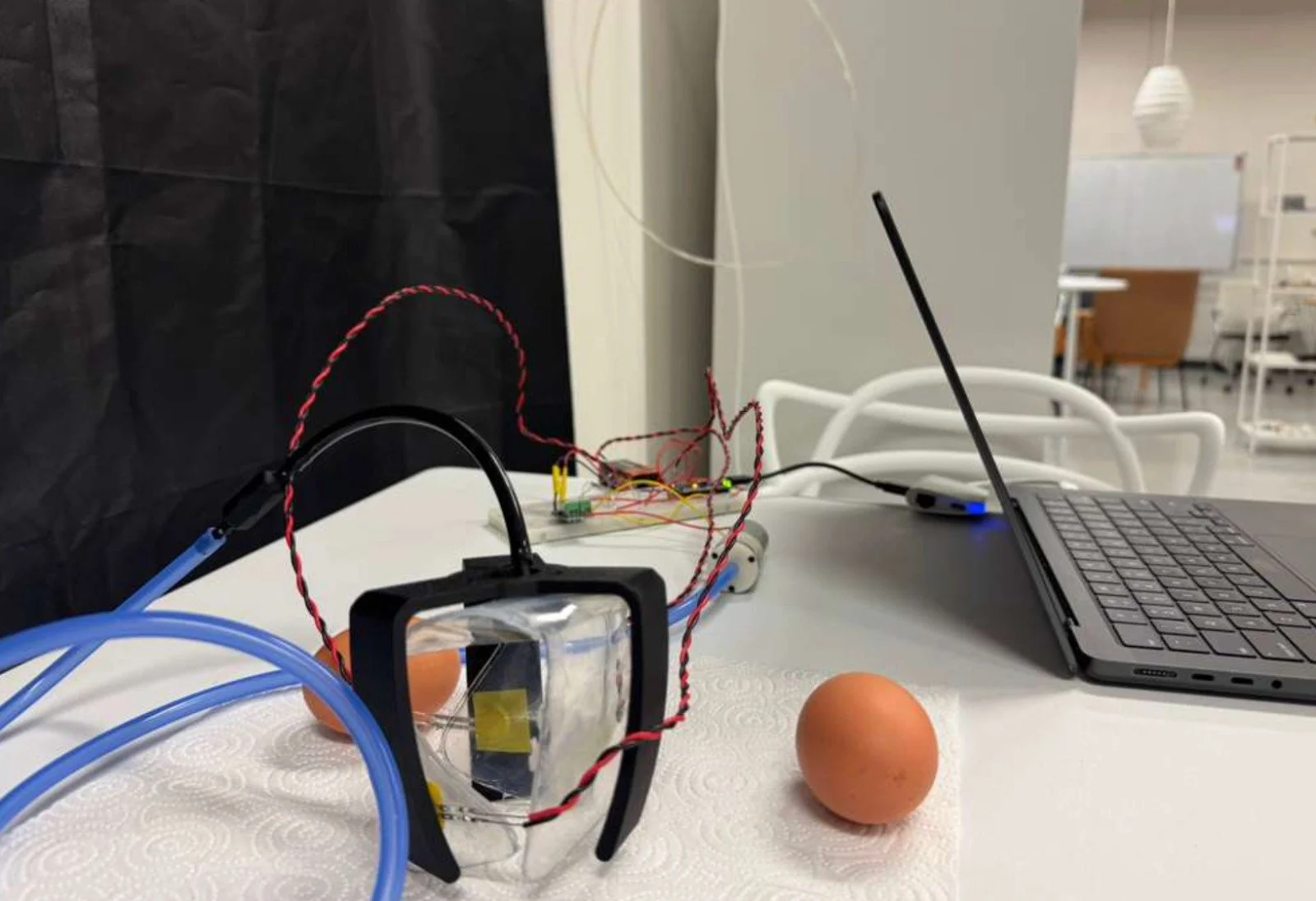
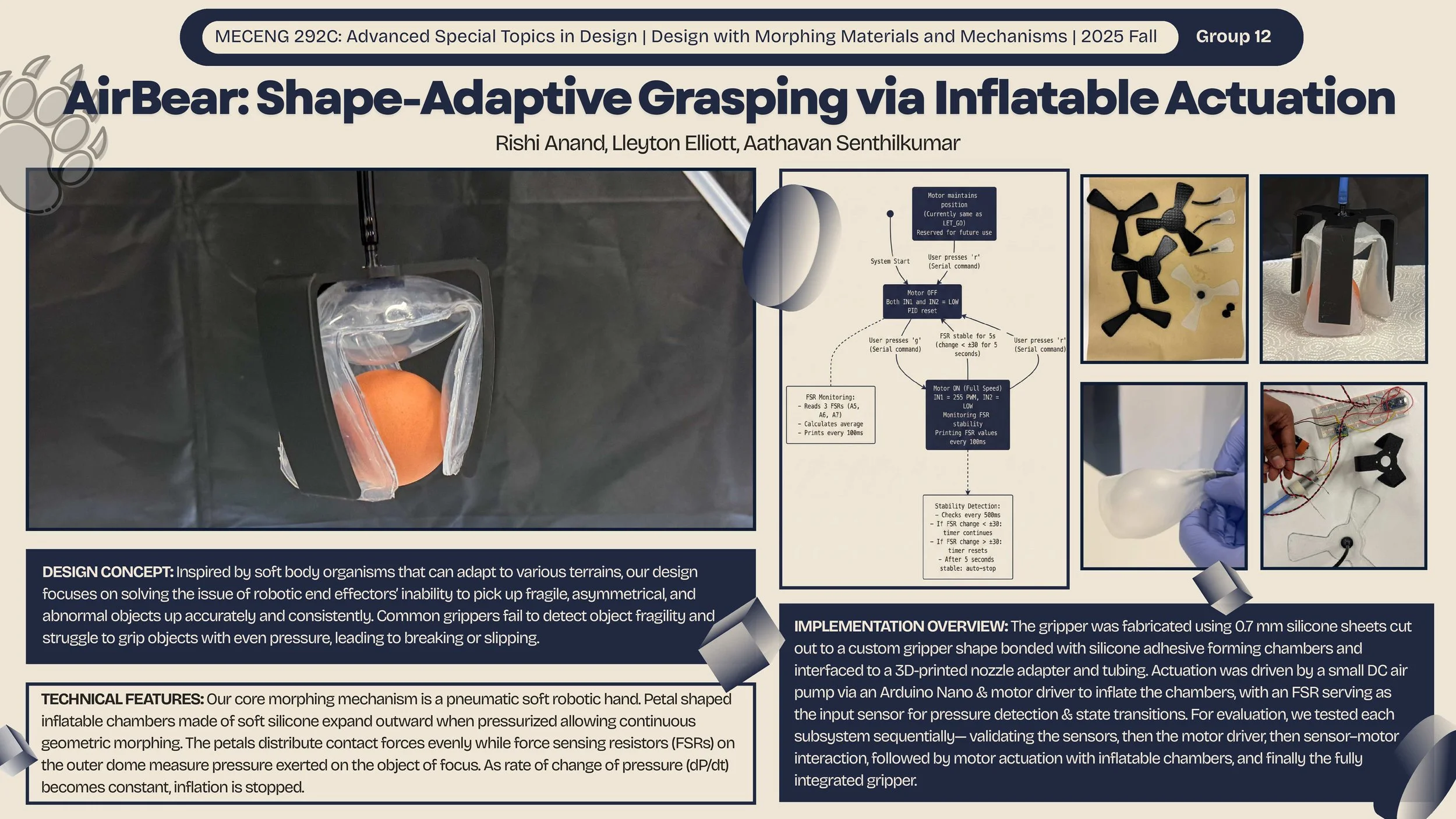
- Designed and prototyped pneumatic robotic gripper for consistent and robust manipulation of fragile and asymmetrical objects
- Created entire system from scratch, including 3D-printed hose fittings (valves, air pump adapters, and flanged couplings), 3D-printed structure, and custom inflatable “hand”
- Iterated through many materials and shapes of the inflatable component, including cured EcoFlex and silicone sheets
- Created control system using force-sensitive resistor signal on rigid outer cage to approximate the behavior of the pressure curve
- Personally conceptualized the overall system architecture
August 2025 – December 2025

ME 239 Robotic Locomotion
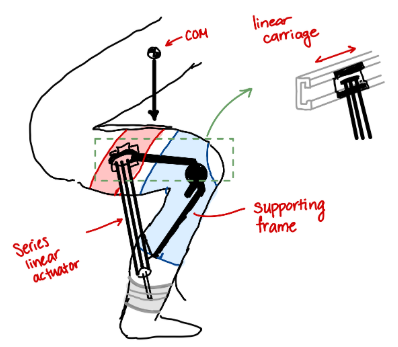
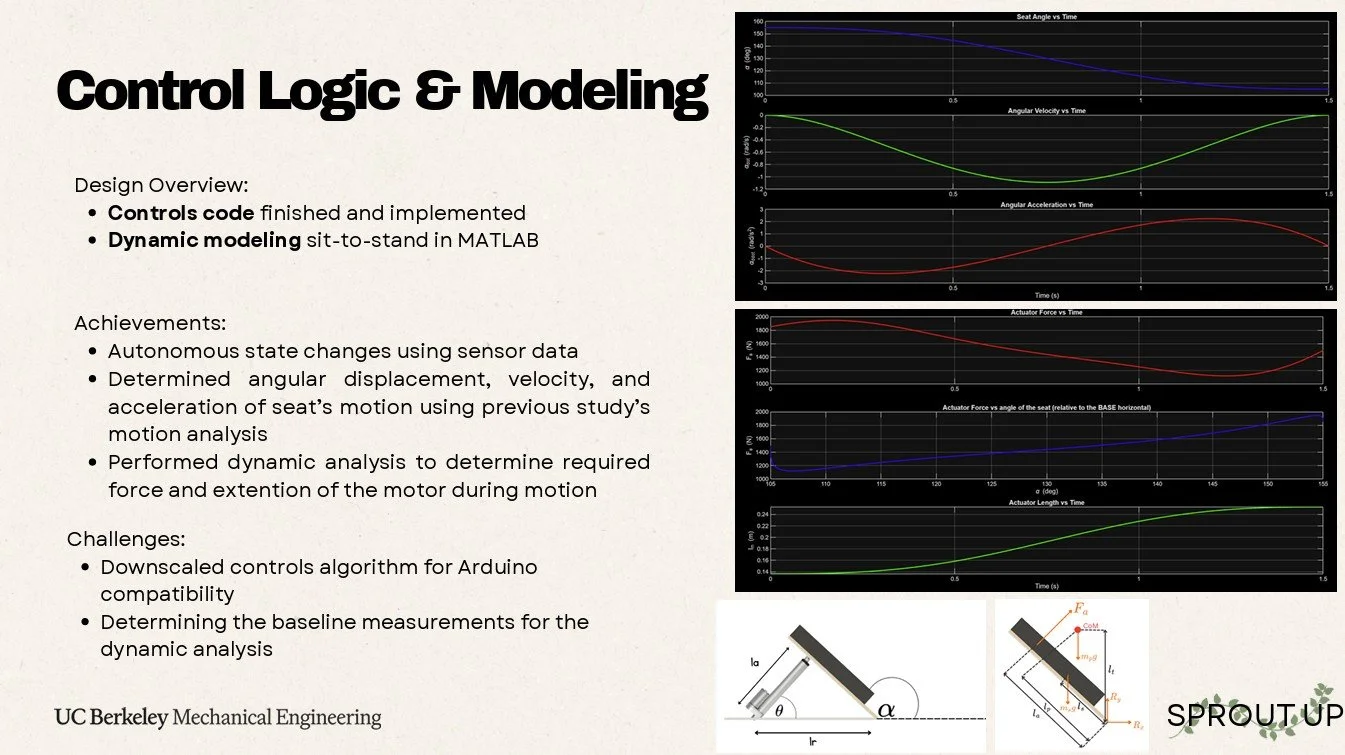
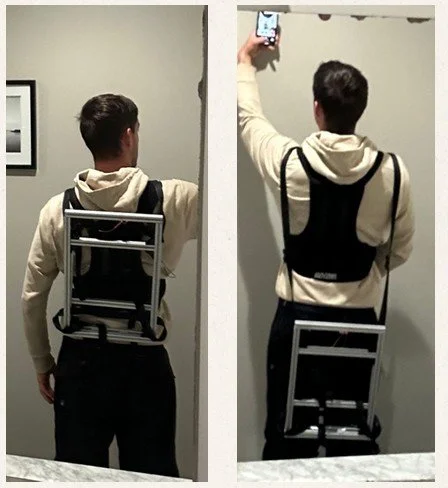
- Designed and prototyped wearable sit-to-stand assistive device for elderly or disabled patients
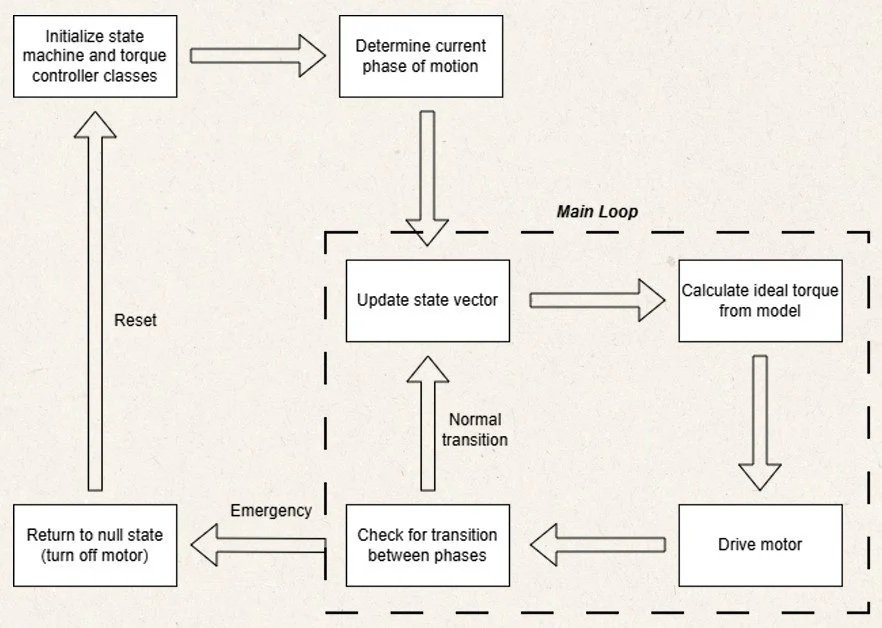
- Wrote a suite of Micropython code (later rewritten in C++ for final project sprint), including dynamic programming-esque trajectory following, robust state handling, and low-level torque control
- Had input on overall system architecture, including the mechanical design and wearability aspects of the project
- Created protoboards and wired and implemented all sensors during integration sprint
- Worked around component failures with clever rewiring and coding solutions, demonstrating a looks-like and works-like model for the final deliverable
August 2025 – December 2025
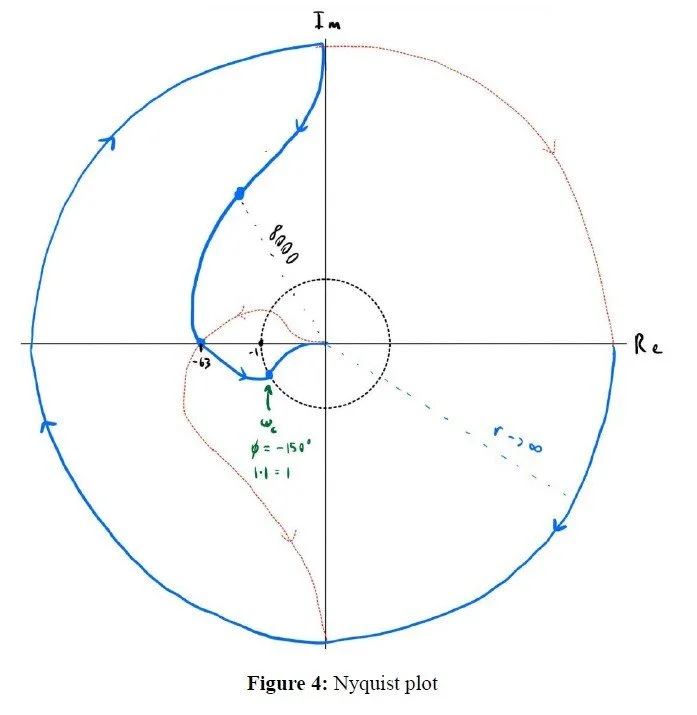
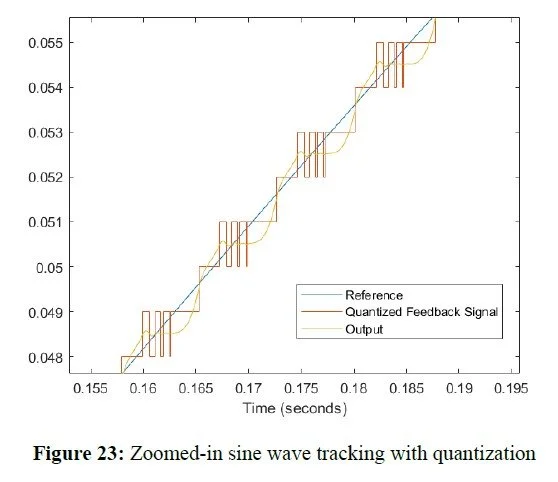
2.14 Analysis & Design of Feedback Control Systems
- Conducted robust experiments to characterize and control various systems in advanced control theory class, including diamond turning tools, MagLev stations, and temperature-controlled circuits
- Created thorough written reports that included both hand-sketched and measured/simulated versions of root locus, Bode, and Nyquist plots to demonstrate understanding
- Explored effects of quantization on closed-loop analog control systems
- Described the relationship between analog and digital control, implementing digitized controllers on various systems in class
- Ran Simulink models and used oscilloscopes to investigate difference between simulated closed-loop behavior and real-world behavior
February 2025 – May 2025
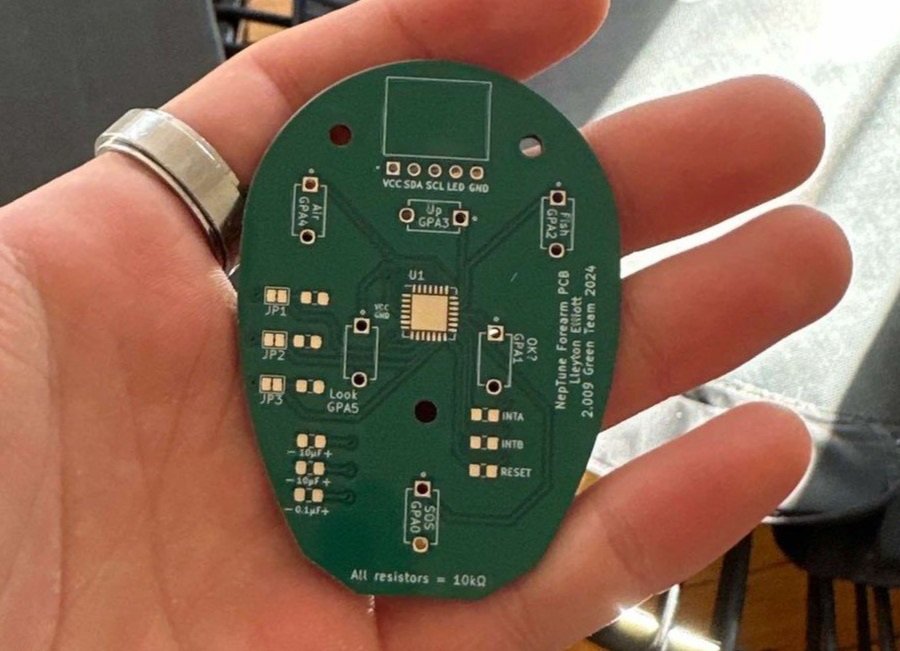
2.009 The Product Engineering Process
- Ideated, designed, prototyped, and presented a fully functional and completely original product: Neptune, a wearable wireless underwater communication system for scuba divers
- Helped design and waterproof the armband and the housing for the electronics
- Designed PCB for final production to specification
- Led final integration effort, assembling and testing complete systems in 1-week end-of-semester sprint (having contributed heavily to both the mechanical and electrical subsystems)
- Led customer discovery and UX design efforts for capstone team of 18 students
- Presented on behalf of the team for mid-semester Architecture Review
September 2024 – December 2024


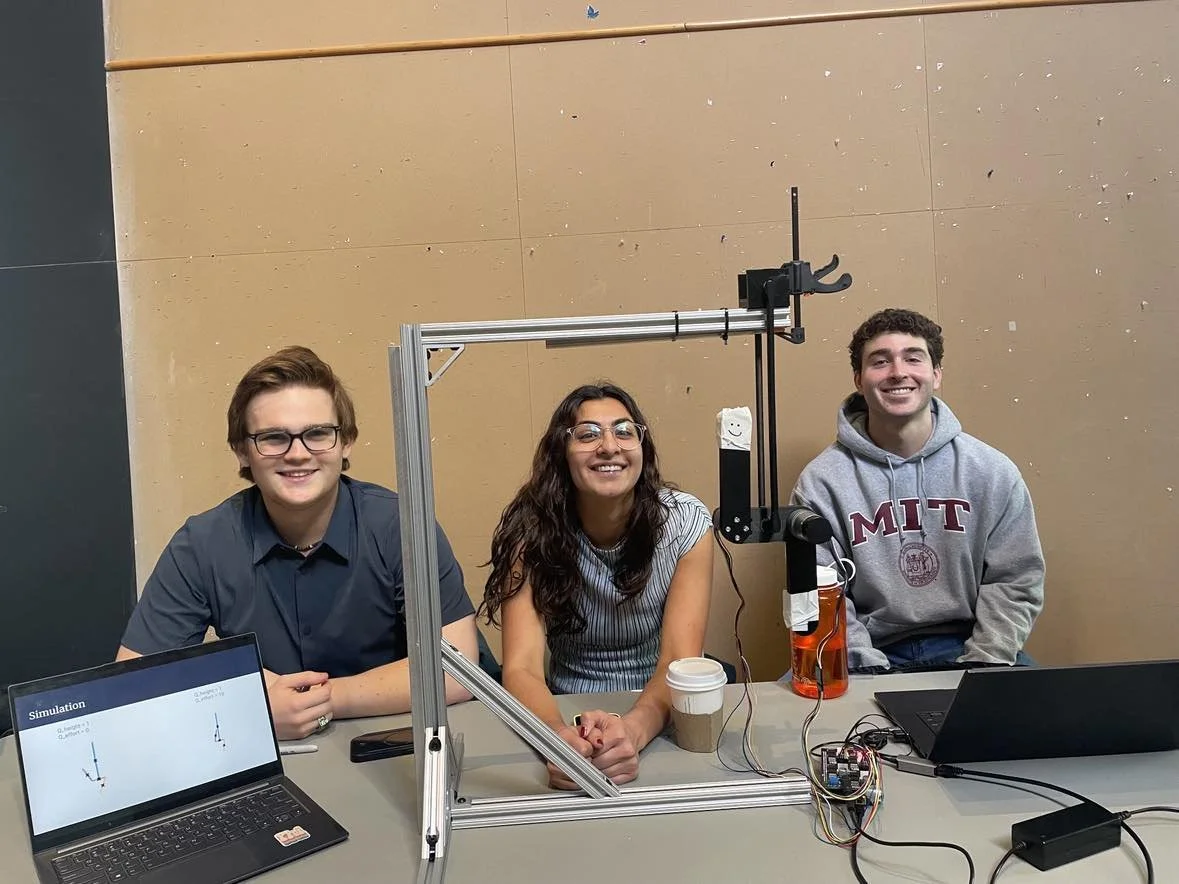
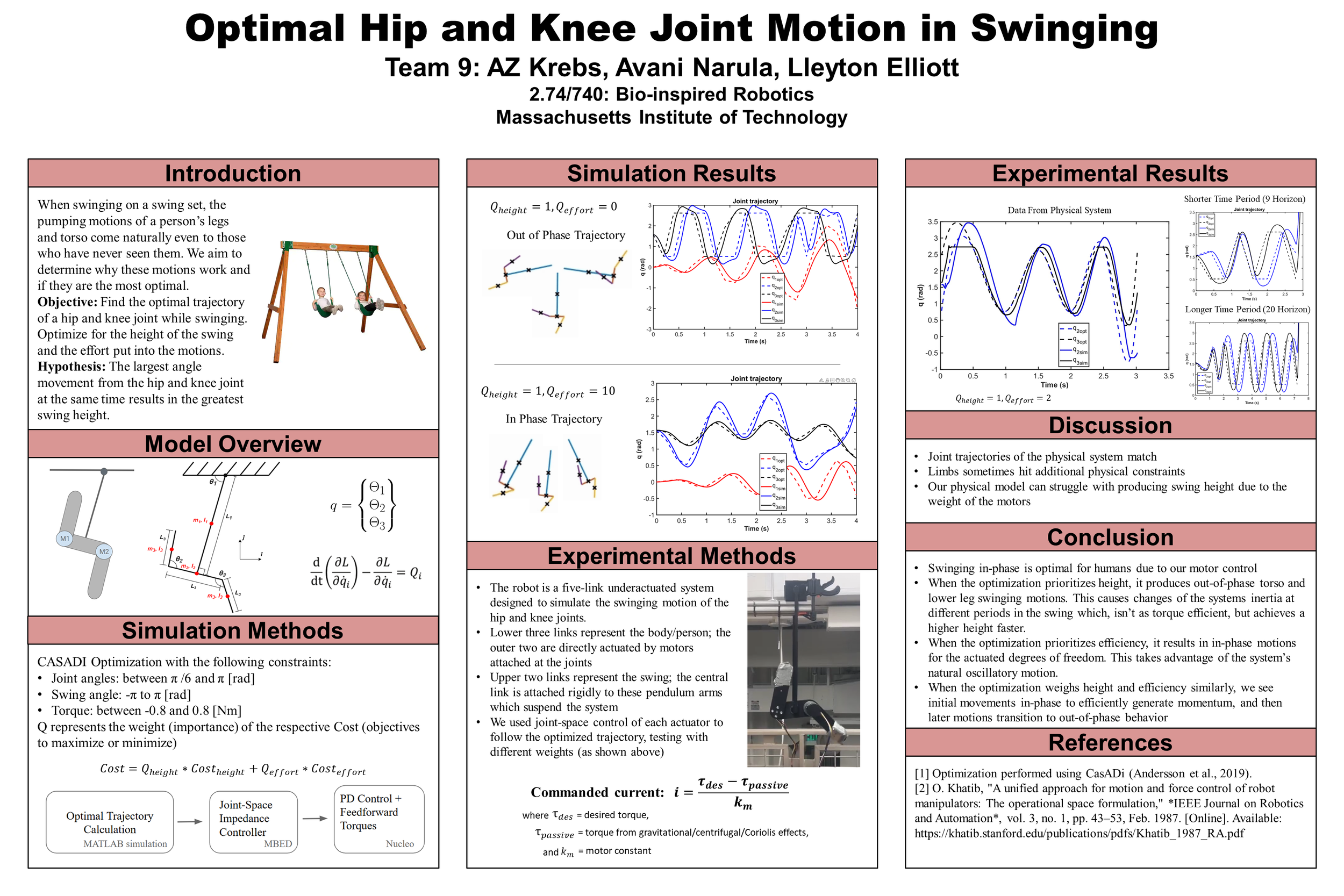
2.74 Bio-Inspired Robotics
- Personally created underactuated swinging robot from scratch for final team research project
- Optimized for maximum swing height, then for minimum swing effort in the hip and knee joints, to compare our findings to typical human motion on a swing
- Created final poster for live project presentation session
- Throughout semester, modeled and simulated legged robots in homework assignments and implemented impedance control and trajectory optimization on real-world systems in labs
September 2024 – December 2024

Lab Assistant, 2.12 Intro to Robotics & 2.004 Dynamics & Control II (MIT MechE)
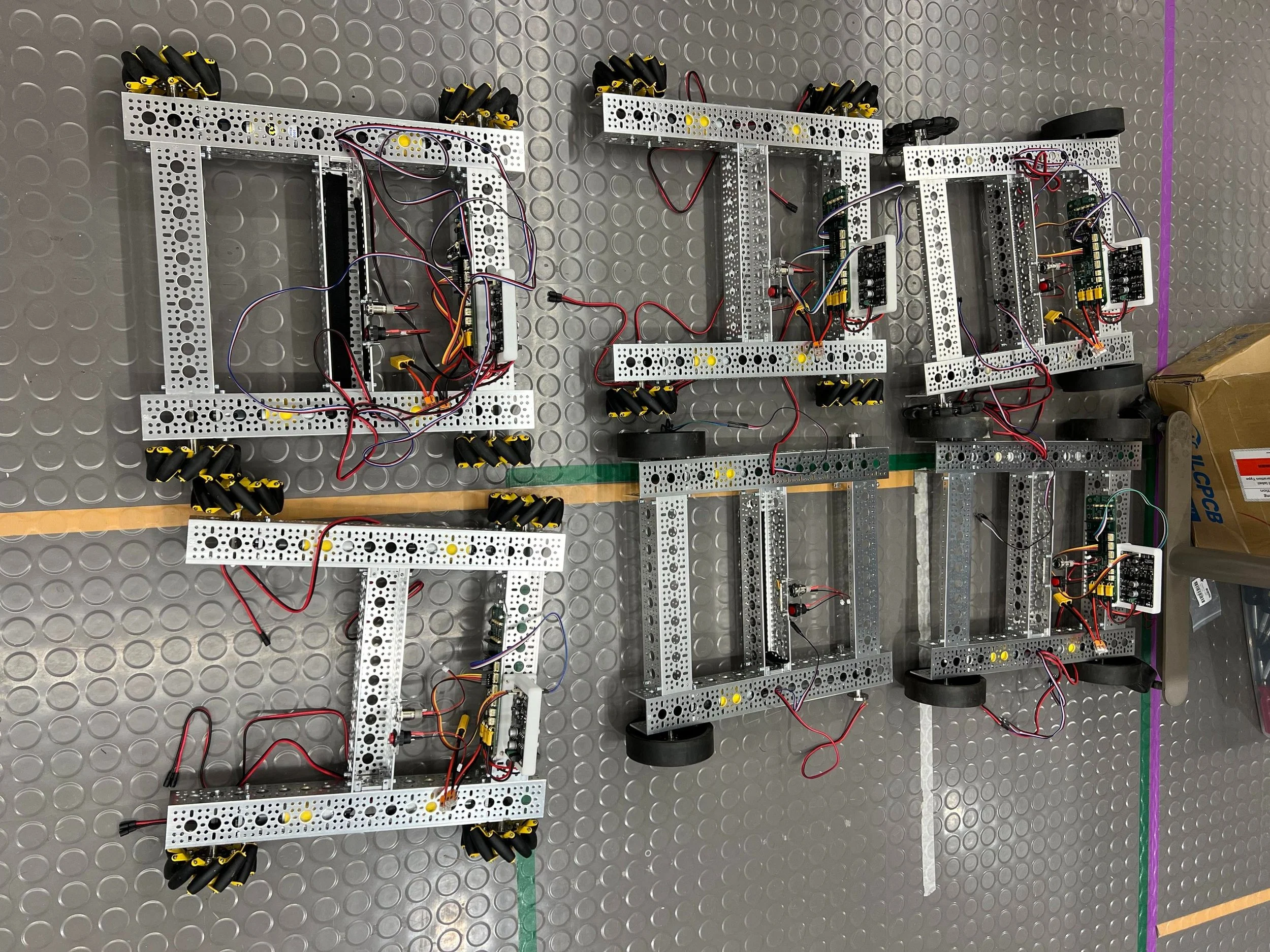
- Developed and maintained equipment for hands-on instruction in advanced robotics project class and upper-level core controls class, including MagLev systems, mobile robots, and self-balancing “Segway” robots
- Helped create final project parameters and environment for testing robots in intensive graduate-level robotics course
- Instructed and facilitated directly during lab sections
- Gave students feedback and graded assignments
September 2023 – May 2025


Vehicle Systems Engineering Intern, Toyota Racing Development
- Used a framework of an existing thermal model to write code to approximate the temperature of a component we couldn’t measure directly
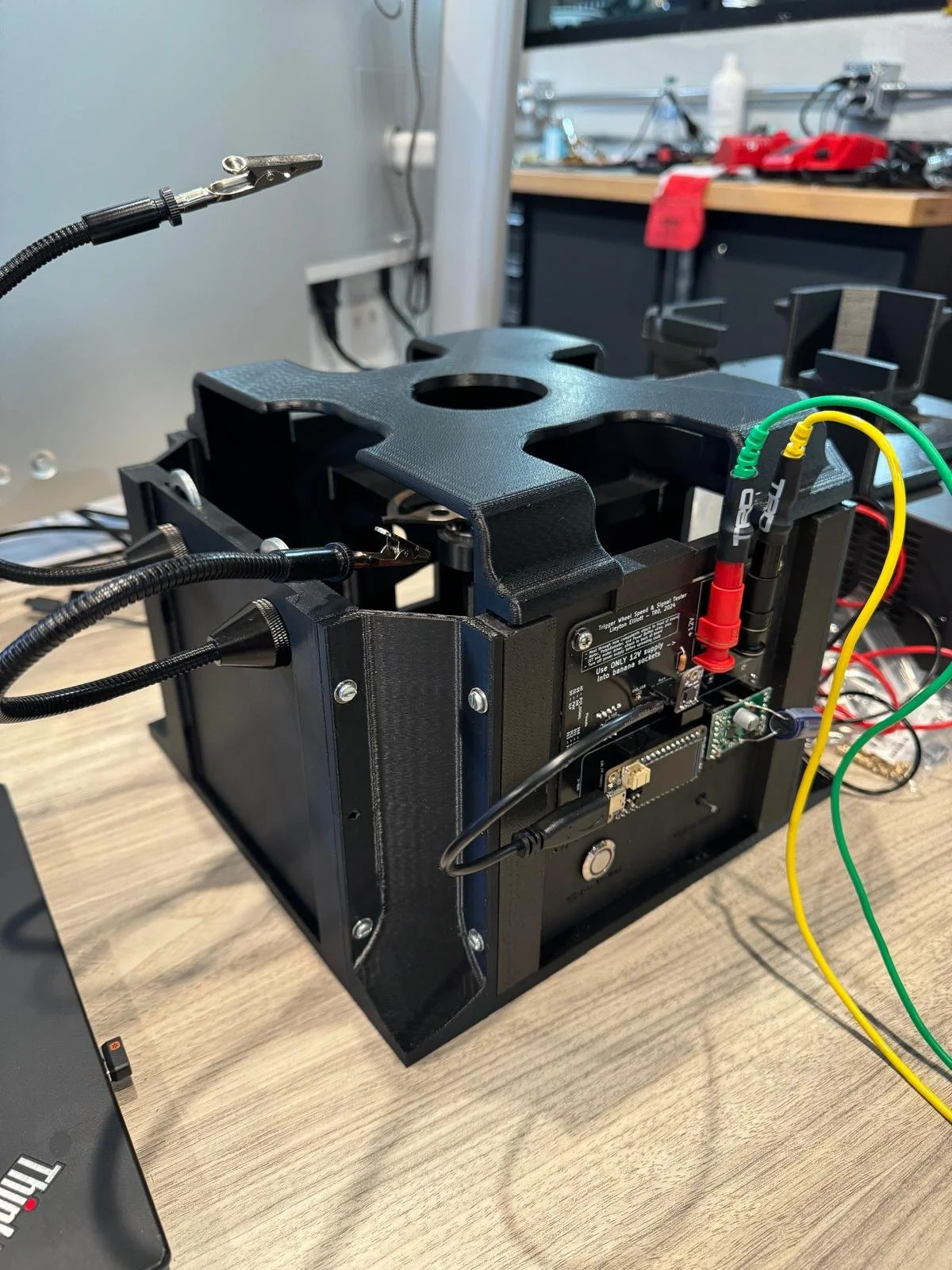
- Created benchtop testing rig to spin encoder wheels at high speeds, minimizing runout to securely hold sensors as close as 1mm without any contact
- Designed custom PCBs for motor control, power management, and breakout power to sensors on the testing rig
- Designed custom mounts to route wires through vehicle chassis, keeping them out of the way of the driver and other components
- Created wiring harnesses, characterized behavior of engine components, and performed other production-level tasks to get GR Corolla cars ready for racing
May 2024 – August 2024

Co-Author on lab automation paper with MIT Accelerated Materials Lab for Sustainability
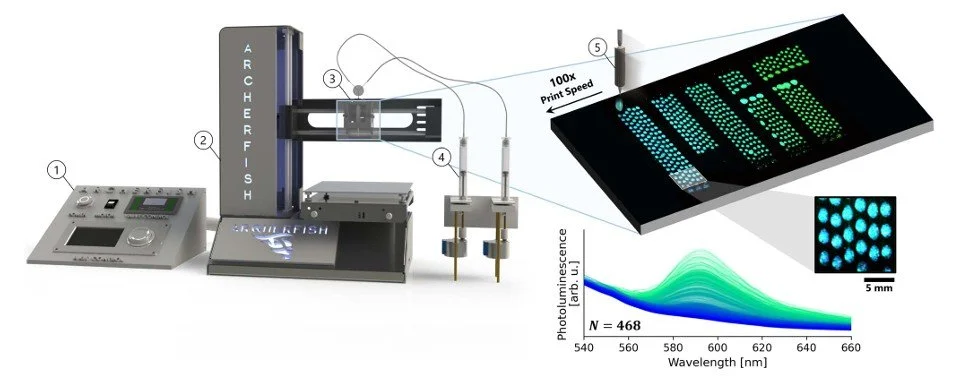
- Archerfish: a retrofitted 3D printer for high-throughput combinatorial experimentation via continuous printing (publication title)
- Developed hardware and software to connect discrete lab testing equipment, closing the loop on experiments that previously needed human intervention at every step
- Worked with outside collaborators from academia and industry
- Research contributed to materials discovery for perovskite solar cell precursors
June 2022 – January 2024