2.74 Bio-Inspired Robotics
Student, Fall 2024
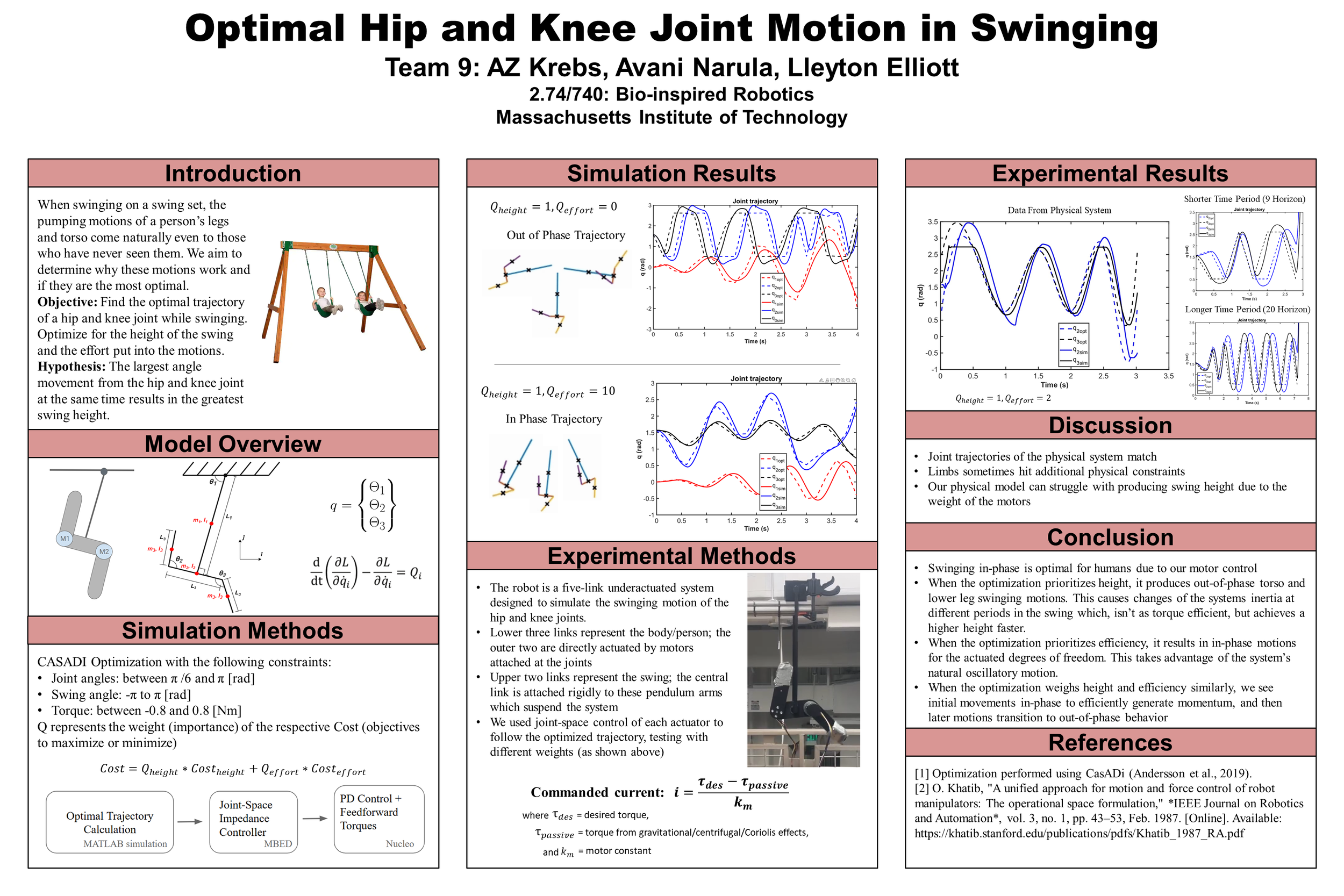
2.74 is an advanced robotics and controls class with both undergraduate and graduate students. Homework and lab assignments throughout the semester involved modeling and simulating robotic systems, implementing joint-space and operational-space impedance control, and trajectory optimization. The goal of the final project was to ask and answer a research question with a non-trivial answer, using a bio-inspired robotic system of the students’ own construction. For this final project, my group decided to optimize the joint motion of a 3-DOF underactuated swinging robot based on two parameters: maximizing swing height and minimizing swing effort. I designed the hardware for the project, which included the robot (three-link linkage) itself, as well as the swinging arms, a mount for the arms, and features to integrate measuring devices such as encoders to measure the swinging motion. I also helped define the optimization parameters and write/edit the final presentation and poster for the class’s postering session that was open to the entire MIT community.

My 2.74 team with our robot at the postering session
Our 2.74 swinging robot
Final poster
Skills: Dynamics, advanced controls, linear algebra, modeling + simulation, literature review, engineering communication, presentation, CAD (Solidworks), optimization, embedded programming, MATLAB